- Мощность — 0.37 кВт
- Обороты — 3000 об/мин
- Габариты — 237х142х126 мм
- Вес — 5.2 кг
- Страна производитель — Китай, бренд РФ
3 450 р.
Электродвигатель - это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель, изобретенный в 1889г. электротехником Михаилом Осиповичем Доливо-Добровольским, который доказал оптимальность системы трехфазного переменного тока. Электродвигатели АИР отличаются простотой конструкцией и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых оборотах. Асинхронные электродвигатели могут эксплуатироваться в макроклиматических районах с умеренным, тропическим, умеренно холодным и холлодным климатом в условиях. Асинхронная машина, работающая в режиме двигателя, применяется в электроприводах, не требующих регулирования частоты вращения вала электродвигателя (напр., в насосах, редукторах, вентиляторах и др.)

Асинхронные электродвигатели широко применяются в приводах металлообрабатывающих, деревообрабатывающих и других видов станков, кузнечно-прессовых, ткацких, швейных, грузоподъемных, землеройных машин, вентиляторов, насосов, компрессоров, центрифуг, в лифтах, в ручном электроинструменте, в бытовых приборах и т.д. Практически нет отрасли и техники, где не использовались бы электродвигатели.
Структура серии АИР предусматривает следующие группы и виды исполнения:
- модификации по условиям окружающей среды;
- по точности установочных размеров;
- с дополнительными устройствами (с фазным ротором, со встроенным электромагнитным тормозом), с повышенным скольжением, многоскоростные, узкоспециальные (для судовых механизмов, для привода моноблочных насосов, рудничное исполнение, для привода безсальниковых компрессоров и др.).
Электродвигатель АИР основного исполнения предназначен для работы от сети переменного тока частоты 50 Гц и изготовляется на номинальные напряжения: 220В, 380В, 660В, 220/380В, 380/660В.
Конструктивные исполнения и способ монтажа по ГОСТ 2479-79 (электродвигатели АИС по стандартам DIN42673/DIN42677).
- Виды монтажа электродвигателей
- Обозначения специального исполнения электродвигателей
- Расшифровка условного обозначения электродвигателей АИР
- Устройство асинхронных электродвигателей

Электродвигатели являются встроенными элементами рабочих узлов техники, и именно они обеспечивают правильную работу. Неважно, промышленное ли бытовое это оборудование эти устройства никак не смогут обойтись без использования электромотора и чаще всего в настоящее время для этого применяются именно асинхронные электродвигатели.
Электродвигатели этого типа имеют довольно обширную область применения т.к. что их особенностью является практически полная независимость частоты вращения вала от нагрузки на нем.
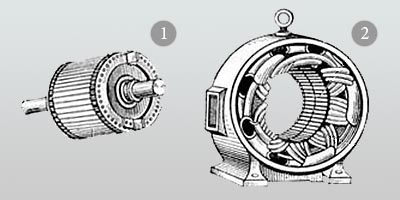
Устройство асинхронных электродвигателей. Асинхронные электродвигатели состоят из двух частей:
1. Ротор это внутренняя часть двигателя, она вращается и несет на себе обмотку.
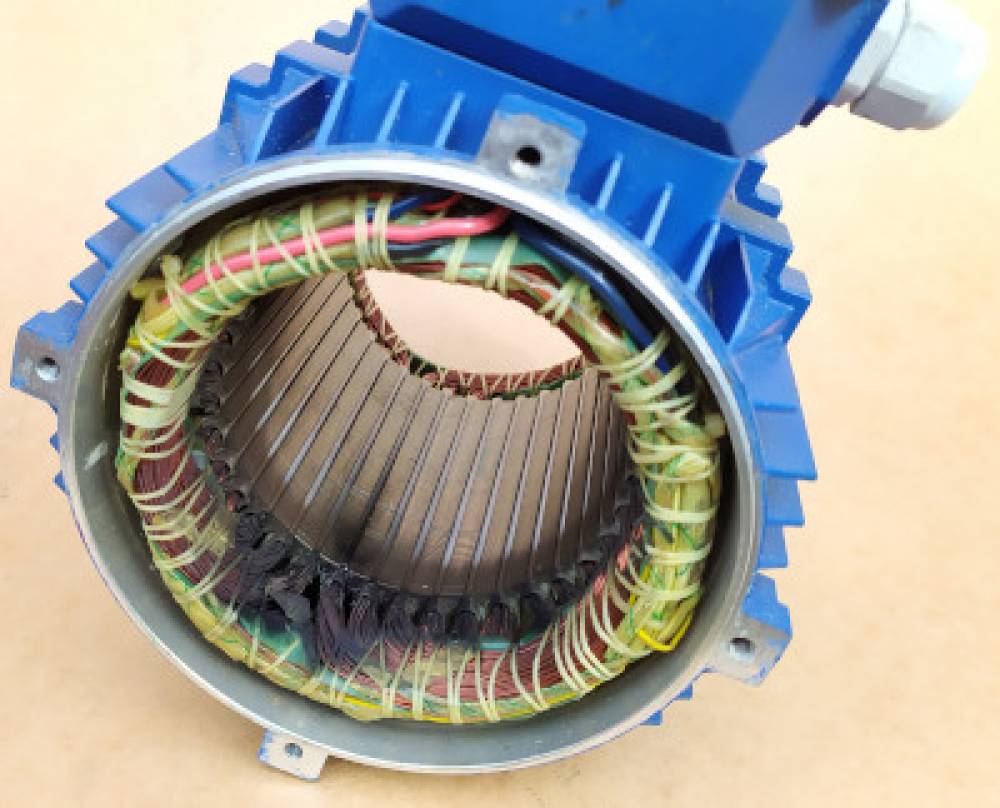
2. Статор является внешней частью представляющей собой корпус двигателя и называется статор, она неподвижна, внутри неё имеются специальные пазы (магнитопровод), куда пофазно уложены витки (секции) обмоток (статорная обмотка). Фазы статорных обмоток могут быть соединены «звездой» или «треугольником».
Собираются обе эти части из изолированных листов штампованной стали толщиной около 0,35-0,5 мм. Для высокомощных машин зазор между ротором и статором делается как можно меньше, порядка 1-1,5 мм, в маломощных двигателях еще меньше. Вал вращается в подшипниках, расположенных в подшипниковых щитах.
- Виды асинхронных электродвигателей
- Принцип действия асинхронных электродвигателей
В результате взаимодействия магнитного поля стержней, вызываемого этим электрическим током с магнитным полем статора и образуется сила, создающая вращающийся электромагнитный момент, т. е. вращение ротора.
Частота вращения вала асинхронных электродвигателей зависит, прежде всего, от количества пар полюсов, определяемых количеством катушек на каждую фазу. Так, три катушки обмотки создают двухполюсное магнитное поле (одну пару полюсов). При стандартной частоте 50 Гц скорость вращения ротора будет порядка 3000 об/мин. При увеличении магнитного поля по полюсам снижается скорость вращения ротора, например магнитное поле при шести полюсах имеет скорость в три раза меньше, чем у двухполюсного.
В настоящее время, большее применение получили двигатели с короткозамкнутым ротором, из-за простоты устройства, а значит, во многом – и простоты ремонта, обслуживания и удобства эксплуатации. Двигатели с фазным ротором используются значительно реже.
- Начала и концы обмоток электродвигателей - простой способ определения
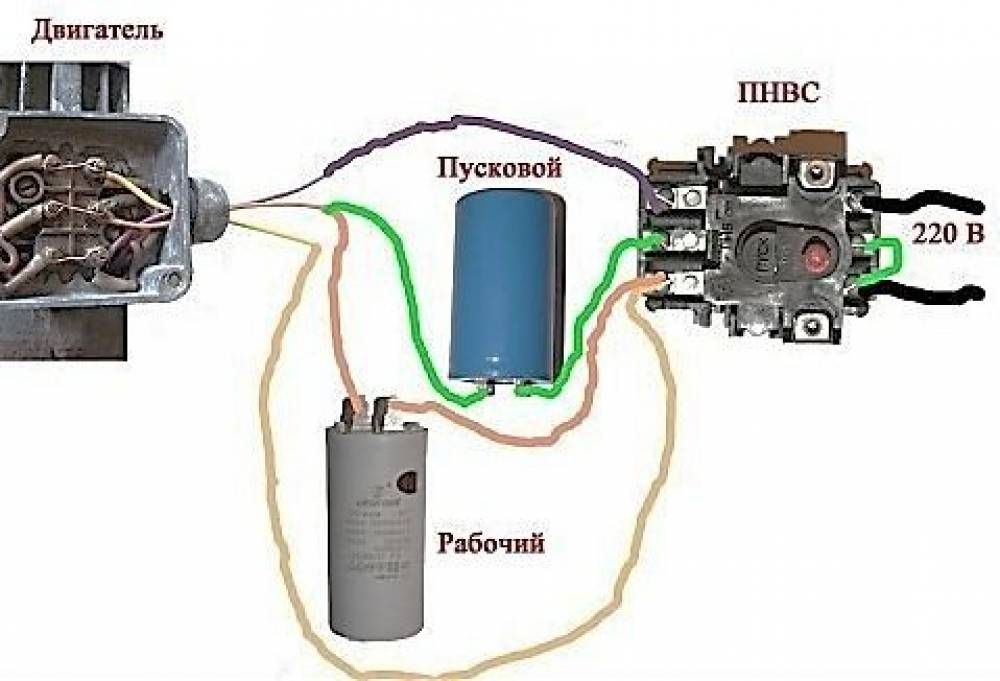
Соединяться обмотки двигателя могут и в клеммной коробке: в этом случае все концы обмоток выводятся в коробку виде двух разделенных пучков по три провода ("начала" и "концы").
Наконец, выводы обмоток могут быть промаркированы металлическими бирками (С1-С2-С3 – "начала", С4-С5-С6 "концы" обмоток). Однако, в некоторых случаях попадаются электродвигатели, в клеммную коробку которых просто выведены шесть немаркированных "концов" обмоток, не разделенных на пучки. В некоторых случаях, бывает, что после ремонта его обмоток – перемотки, в клеммную коробку двигателя выводят шесть совершенно одинаковых проводов одного цвета.
В этом случае, для правильного соединения. необходимо определить "начала" и "концы" обмоток электродвигателя. Для этого, сначала нужно "найти" обмотки, т. е. определить пары проводов отдельных фазных обмоток. Прозвонить пары можно любым тестером или при помощи контрольной лампы, после чего следует промаркировать найденные фазные обмотки.
Теперь нужно определить начало и конец найденных пар фазных обмоток, существуют несколько способов определения, наиболее распространенный и достаточно надежный способ – следующий:
Две любые "найденные" фазные обмотки, соединенные последовательно включают в сеть ~220 В, а к выводам третьей подключают контрольную лампу или вольтметр, с установленным пределом измерения до 100 В. Слабый накал лампы или отклонение стрелки вольтметра будет признаком, того, что две, последовательно включенные в сеть обмотки, соединены таким образом, что, «конец» одной обмотки соединен с «началом» другой.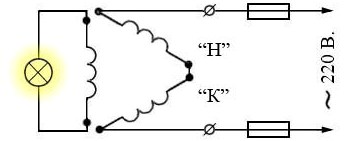
Соответственно, полное отсутствие накала лампы или отклонения стрелки вольтметра – свидетельство отсутствия ЭДС в третьей обмотки, следовательно, последовательно включенные обмотки соединены своими "началами" или "концами". Таким образом, определив "начала" и "концы" двух обмоток, выводы маркируются.
Теперь нужно определить "начало" и "конец" третьей обмотки, для этого ее соединяют последовательно с любой из обмоток, "начало" и "конец" которой уже определены и, подключив лампу или вольтметр к оставшейся обмотке, по аналогии предыдущего опыта находят "начало" и "конец".
- Асинхронные двигатели и их управление
Типы асинхронных двигателей, проблемы и перспективы их использования, связанные с частотными преобразователями.
Самыми надежными в эксплуатации, по праву являются асинхронные электродвигатели переменного тока.
Это объясняется, прежде всего, простотой их конструкции: ведь асинхронный двигатель с короткозамкнутым ротором не содержит в ней никаких траверс, щеток или коллекторных пластин.
Лишь, статорная обмотка и роторная - выходить из строя здесь, собственно, и нечему. Благодаря такой простоте, эти двигатели служат, практически безо всякого ремонта и обслуживания десятилетиями. Но все же, имеются и определенные проблемы при их использовании. Скажем, всем хорош асинхронный электродвигатель с короткозамкнутым ротором, но регулировать скорость его вращения и управлять его пуском можно, только изменяя частоту переменного тока питающей сети.

В противном случае, запуск непременно сопровождается большими бросками тока, а скорость, обусловленная жесткой электромеханической характеристикой, всегда остается практически неизменной. Поэтому, асинхронные двигатели с короткозамкнутым ротором долго применялись только в простых и не очень мощных приводах; в дисковых пилах, насосах и др.
Асинхронные машины с фазным ротором до недавнего времени были намного популярнее и применялись для мощных приводов, где необходимо было регулировать скорость и пуск. Это приводы крановых механизмов, шахтных подъемных машин, лифтов и т. п.
Регулирование в них осуществляется ступенчатым или бесступенчатым введением сопротивлений в цепь ротора двигателя. Больше сопротивлений – меньше скорость. Правда, надо сказать, при таком способе регулирования страдает КПД привода, но это уже считалось неизбежным злом.
Наступило время для асинхронного электропривода с широким распространением инверторных частотных преобразователей. Эти преобразователи способны полностью автоматизировать пуск, работу и торможение асинхронного электродвигателя с короткозамкнутым ротором, изменяя частоту питающей сети. Кроме того, в составе самого преобразователя предусмотрены все виды необходимых защит для привода и силовой цепи в целом
- Плавный пуск асинхронного двигателя
Асинхронные двигатели получили широкое распространение благодаря следующим своим качествам: дешевизне двигателя, простоте конструкции, надежности, высокому к. п. д. До настоящего времени асинхронные двигатели уступали место двигателям постоянного тока только в тех случаях, где требовалось плавное регулирование частоты вращения (строгальные станки, правильные машины, регулируемые главные приводы прокатных станов и т. п.), в электрическом транспорте и в приводах большой мощности повторно-кратковременного режима (реверсивные станы). Внедрение в промышленность регулируемых преобразователей частоты позволяет, еще шире применять асинхронные двигатели.

Итак, для чего нужно ограничивать пусковой ток в обмотках статора асинхронного электродвигателя с короткозамкнутым ротором?
Необходимость ограничения тока двигателей диктуется причинами электрического и механического характера.
Причины электрического характера ограничения тока двигателей могут быть следующие:
1) Уменьшение толчков тока в сети. В некоторых случаях для крупных двигателей требуется ограничить пусковой ток до допускаемого для питающей системы.
2) Уменьшение электродинамических усилий в обмотках двигателя.
Уменьшение толчков тока в сети требуется обычно при пуске крупных асинхронных двигателей с короткозамкнутым ротором, если они получают питание от сравнительно маломощной питающей системы. Кроме того, для крупных двигателей заводы-изготовители машин не разрешают прямой пуск из-за чрезмерно больших электродинамических усилий в лобовых частях обмоток статора и ротора.
Причины механического характера ограничения момента двигателей могут быть самыми разнообразными, например предотвращение поломки или быстрого изнашивания передач, соскальзывания ремней со шкивов, буксования колес подвижных тележек, больших ускорений или замедлений, недопустимых для оборудования или людей в различных средствах передвижения и т. д. Иногда требуется уменьшить пусковой момент двигателей, даже небольших, для того чтобы смягчить удары в передачах и обеспечить плавное ускорение.
Во всех случаях, где условия работы не требуют форсированных ускорений или замедлений, желательно рассчитывать режимы на минимальные броски тока, а следовательно, и момента, сохраняя этим передачи механизма и двигатель.
Для ограничения тока применяются пусковые реакторы, резисторы и автотрансформаторы, а также современные электронные устройства - софт-стартеры (устройства плавного пуска двигателей).

Необходимо обратить внимание на то, что ограничение тока и момента с помощью устройств плавного пуска двигателей получается за счет усложнения схемы управления и удорожания установки, а потому должно применяться только там, где это обосновано.